
現今機器人依舊尚未在全世界流行起來,不過多虧了雲端的發明,將有機會將機器人的發展推向高峰。在以下的文章,作者(柏克萊大學工程教授 Ken Goldberg)將會解釋現代科學家該如何利用無線網路、Big Data、機器學習、開放資源還有網路資源操作在機器人上,使得它們能夠協助人類辦好大小事,舉凡開車、做家事甚至到動手術。(以下以作者第一人稱撰寫)
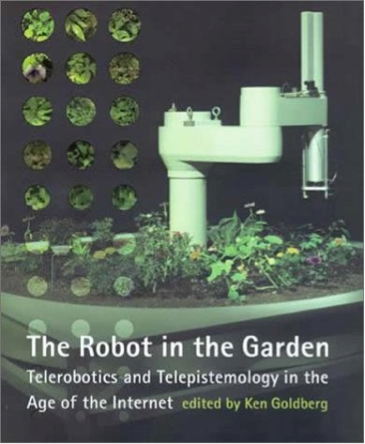
歷史上首個互動裝置 —— 遠端園藝機器人在 1996 年就已崛起
當時網路才剛問世,我是南加大機器人實驗室的一個年輕教授,負責帶幾個研究生。有一天他們來我的辦公室並且給我看了一個東西,著時讓我大開眼界,他們打開我的桌電並用了當時唯一的瀏覽器 Mosaic,瀏覽了當時的第一個網站,以及視訊鏡頭的運用。
當天,我和我的學生腦力激當到深夜,討論該如何將這個點子套用在機器人上,我們認為通俗的視訊鏡頭範圍太過固定,視訊者無法看到對方的整體環境,於是我們想何不將視訊鏡頭放在我們的機器人上,並使用網路隨時遠端操控我的機器人。
我們常想為何老是要讓機器人幹些無聊的事?與其讓它只會堆東西,何不讓它成為園丁?我們拿了一個裝有鏡頭的工業用機器手臂,也設定了灌溉系統再加上一個噴嘴,使得它能夠輕易灌溉以及播種。我們也特別架設了一個互動網站,讓所有人可以即時觀察它從事園藝的過程,同時還能利用網路遠端操作這個機器人手臂,打造自己的花園。

短短幾個禮拜,我們的互動網站吸引了上千人到訪,許多人也在我們的聊天室留了不少正面的評論,有些甚至拜託其他人幫他們照顧幾株花草因為他們正要去度假呢。面對這個機器人的人氣飆升,其實我和我的學生們都很訝異,畢竟我們都認為園藝在網路上會是最不吸引人的東西。
大家使用我們的機器手臂超越其他種類機器人
我們創造的遠端園藝機器人是歷史上首個互動裝置,MIT Press 甚至發行兩本關於這個機器人的書,之後越來越多的裝置及系統懂得和網路做連線。
自從那時,機器人領域開始擴大,現在有大概 5 百萬種服務型機器人例如 Roomba,還有超過 3000 個機器人在世界各處的手術房中協助手術進行。
當微軟第一次將 Kinect 3D 運用在遊戲上,也間接促成機器人領域的大突破,因為它給了機器人一個較低成本的方式使用 3D 點雲,幫助機器人可以導航及操作。
不過對於機器人來說,摺衣服、洗碗等家務事依舊太過困難,它們無法任意地控制四肢,而我相信雲端將會是解決這類問題未來的關鍵。以 Google 的機器車為例,這輛車就是使用網路進入 Google 龐大的數據庫,以獲取 Google map、街景及衛星等資料,再利用 GPS 定位、3D 感應以測量安全距離。

雲端機器人的五個要素
Big data
2012 年的獨立電影 Robot & Frank,以獨特的角度描繪未來機器人的全景,電影內容大概是講一個老人因為記憶退化的關係,所以家人寄了一個機器人給他幫他打理生活大小事。我看到了這個影片,就夢想我的未來會有一台一模一樣的機器人伴我在左右,除了打理家務、也時刻維持我僅存的記憶。
但問題是儘管機器人接觸的事務多了、能夠記住的模式也多了,但當它接觸到陌生的問題,它依舊無法處理。所以它需要隨時更新,具備龐大的知識庫,但把所有的數據都存在它身上是不可行的,所以這時候就需要雲端的技術插手,畢竟 Big Data 將是未來的重點趨勢。
雲端運算
機器人現在使用的計算方法稱為 Belief Space,機器人解決問題時後台需要龐大的數據庫,幫它處理問題及分析,而這也需要雲端運算的幫助。
開放資源
現在有個有趣的機器人發展軟體簡稱 ROS,也就是機器人操作系統 (Robot Operating System),這是專屬機器人的開放資源軟體,當某人有了一個新的運算方法,它可以利用這個軟體快速分享給全世界的研究者,所以機器人將來勢必會在開放資源的範疇中,研究者共同分享有關機器人的 Code、設計以及數據。
機器人之間的互相學習
其實這有點類似開放資源的模式,只不過不是研究者之間的知識交流而是機器人之間,他們互相分享數據和 Code,加速彼此的進步。
群眾外包 Crowdsourcing
當機器人遇到困難時,可以請求人類的幫助。當機器人遇到困難時,無法處理也無法從其他機器人身上學到解決方法,他就可以轉向人類請益。
機器人現在被視為具備有限計算以及記憶的獨立系統,但雲端機器人改良了舊版機器人的不足,運用網路交換彼此的數據和 Code 後,雲端機器人能為人類做到的事,真的令人振奮!



COMMENT